Основная цель запуска — доставка аппарата Surveyor на Луну с осуществлением мягкой посадки, получение телевизионных изображений лунной поверхности в районе посадки и отработка систем аппарата. При этом запуске продолжалась отработка систем ракеты-носителя. При запуске решались задачи по изучению характеристик лунного грунта по погружению опор посадочного устройства; по испытаниям систем коррекции траектории, мягкой посадки, связи и отработки систем ракеты-носителя. В одну из полых трубок каркаса был помещен американский национальный флаг.
Запуск SC-1 аппарата (рис. 14) произведен 30 мая 1966 г. в 14 час. 41 мин. 09 сек. (расчетное время — 14 час. 41 мин.), со стартового комплекса № 36А м. Кеннеди ракетой-носителем Atlas-Centaur AC-10. Азимут запуска — 102,3°. «Окном» для запуска 30 мая было время с 14 час. 39 мин. до 15 час. 27 мин. Комплекс № 36А восстановлен после разрушения в результате взрыва ракеты-носителя при запуске АС-5 2 марта 1965 г., затраты на восстановление комплекса составили около 2 млн. долл. Полет ракеты-носителя и аппарата проходил по программе близкой к расчетной. Вывод аппарата на траекторию полета к Луне производился по программе, несколько отличной от штатной: не предусматривался повторный запуск двигателей II ступени, а аппарат выводился непосредственно на траекторию полета к Луне. Ниже приведена программа полета при запуске от момента выключения основных двигателей II ступени (в скобках указано расчетное время): Т—момент старта; Т+11 мин. 55 сек.— развертывание посадочного шасси аппарата; Т+12 мин. 05 сек.—подача команд на развертывание стержней, несущих всенаправленные антенны (один из стержней не развернулся), и переключение передатчиков на работу при полной мощности (10 вт вместо 0,1 вт); T +12 мин. 31,1 сек. (12 мин. 31 сек.) —отделение аппарата от II ступени. После выхода аппарата Surveyor А на траекторию полета к Луне он получил название Surveyor I, а по международной системе—обозначение 1966—45А. После того как II ступень совершила разворот на 180°, была осуществлена подача в основные двигатели II ступени компонентов топлива, которые, истекая из сопел без воспламенения создают некоторую тягу; торможение ступени обеспечивается РДТТ, установленными на ней. Через 5 час. после запуска ступень отдаляется от аппарата на расстояние не менее-300 км. После этого маневра II ступень переходит на геоцентрическую орбиту с апогеем 400 000 км, наклонением. 33,6° и периодом обращения 11 сут.
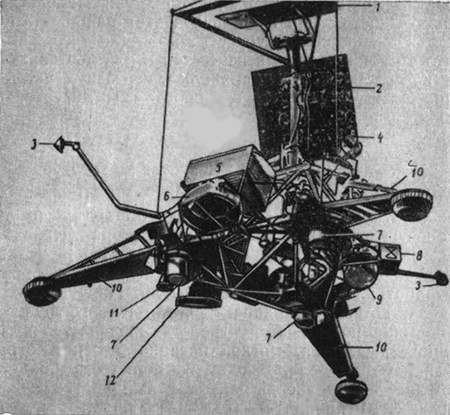
Рис. 14. Космический аппарат Surveyor I
(без тормозного РДТТ).
1—панель с солнечными элементами; 2—остронаправленная
антенна; 3—всенаправленная антенна; 4—панорамная телевизионная
камера; 5 — контейнер с электронным оборудованием
(2 шт.); 6—антенна радиолокационного альтиметра; 7—блок
разрушающейся сотовой конструкции; 8 — контейнер с вспомогательной
химической батареей; 9 — баллон с гелием, используемым
в вытеснительной системе подачи топлива в ЖРД;
10 — «нога» посадочного шасси; 11 — верньерный ЖРД;
12 — антенна доплеровского радиолокатора.
Т+(21 мин. 30 сек.) —начало цикла операций по командам ПВУ (успокоение аппарата, поиск Солнца, ориентация продольной оси аппарата на Солнце, ориентация панели с солнечными элементами на Солнце). Развертывание панели и поиск Солнца могут осуществляться и по командам с Земли; Т+(32 мин.)-Т+(60 мин.)—установление связи с аппаратом станцией слежения в Иоганнесбурге; Т+1 час. 21 мин.—завершение ориентации на Солнце панели с солнечными элементами; Т+4 час 29 мин (6 час) —захват датчиком звезды Канопус. Поиск Канопуса может осуществляться 2 способами; по первому способу аппарат вращается со скоростью 0,5 град/сек, при захвате какой-либо звезды на Землю поступает сигнал о ее яркости и осуществляется сверка с эталоном; другой способ предусматривает вращение аппарата на 360°, регистрацию всех звезд, яркость которых-находится в диапазоне чувствительности датчика и сравнение полученной карты неба с контрольной.
Без коррекции траектории аппарат достиг бы поверхности Луны в точке, находящейся в 400 км к юго-западу от расчетной точки (3,25° ю. ш. и 43,83° з. д.). Потребная величина корректирующей скорости для компенсации промаха и обеспечения требуемой продолжительности полета составляла 6,4 м/сек, а только для компенсации промаха — 3,8 м/сек. 31 мая была проведена коррекция траектории. В период её проведения аппарат находился на расстоянии 156 000 км. от Земли и был в зоне видимости станции слежения в Голдстоуне. Двигатели были включены в 6 час. 45 мин. и проработали 20,75 сек (расчетная продолжительность 20,65 сек), обеспечив приращение скорости 20,3 м/сек. Коррекция проведена с таким расчетом, чтобы аппарат опустился в 32 км от первоначально намеченной точки. Новая расчетная точка посадки имела селенографические координаты 2,3° ю. ш. и. 43,85° з. д. 31 мая в 7 час 03 мин аппарат вновь был ориентирован по Солнцу и Канопусу. Операции, обеспечивающие посадку на Луну, начались на 34 мин. до расчетного времени включения тормозного РДТТ. Аппарат совершил разворот по крену на 89,3°, затем по рысканию на 59,92° и снова по крену на 94,2°, в результате чего продолвная ось аппарата была совмещена с вектором скорости. Маневры завершились за 29 мин. до расчетного времени включения РДТТ. При посадке аппарата РДТТ и ЖРД работали по расчетной программе. Направление вектора тяги РДТТ отличалось от расчетного на 0,3° (допустимое отклонение 1°), а вектор тяги проходил в 0,5 мм от центра масс (допустимое отклонение 4,5 мм). В момент прекращения работы РДТТ скорость аппарата относительно Луны равнялась 131,7 м/сек (расчетная скорость 119±33 м/сек (40). Вертикальная составляющая скорости при посадке аппарата равнялась примерно 3,3 м/сек (74), а горизонтальная составляющая была очень мала (расчетное значение вертикальной составляющей скорости—не более 6 м/сек, горизонтальной—не более 2,2 м/сек). При сближении аппарата с Луной угол между вектором скорости и местной вертикалью составлял 6° (предельный угол сближения для аппаратов Surveyor равен 45°) (63). 2 июня в 6 час. 17 мин. 37 сек. аппарат совершил посадку в Океане Бурь в точке с селенографическими координатами 2°27' ю. ш. и 43°13' з. д. в 14 км от новой расчетной точки посадки.
Опоры шасси аппарата коснулись поверхности с интервалами 0,01 сек, нагрузки на опоры составили 610, 730 и 520 кг, соответственно (21). При первом касании аппарата нагрузка на грунт составила 0,56 кГ/см2, после успокоения аппарата—0,035 кГ/см2 (19). Площадка, на которую сел аппарат, почти параллельна лунному горизонту (уклон не более 1—2°). Первой коснулась поверхности Луны опора 2, затем 1 и 3. Нагрузки при посадке соответствовали тем, которые были рассчитаны по результатам сбросов макета аппарата на имитированный лунный грунт. После первого касания аппарат подскочил на 6 см и опустился через 1 сек., причем опоры погрузились в грунт на 2,5 см (24, 57|). Не развернувшийся в полете стержень с одной из всенаправленных антенн при ударе аппарата развернулся, и антенна в дальнейшем использовалась для связи. В полете связь с аппаратом осуществлялась через одну всенаправленную антенну, на аппарат было послано около 300 прямых команд. Полет аппарата от момента старта ракеты-носителя и до посадки продолжался 63 час. 36 мин. 28 сек. (25,53).
После посадки были выключены радиолокационный альтиметр, доплеровский радиолокатор и датчики напряжения на посадочных ногах и принята телеметрическая информация, показавшая исправность бортовых систем. После проверки панорамной телекамеры началась передача на Землю изображений лунной поверхности и деталей аппарата с разверткой 200 строк. Передача изображений производилась через всенаправленную антенну (высота Солнца над горизонтом в момент начала съемки — 28°). Было получено около десятка изображений опор посадочного устройства, участка лунной поверхности около аппарата и горизонта. В непосредственной близости от аппарата видны камни высотой 1,5 м и длиной до 2 м. Перед запуском аппарата зеркало панорамной телекамеры было установлено в такое положение, чтобы получить изображение одной из опор посадочного устройства. Расстояние от камеры до опоры составляло 2,4 м. При съемке в кадре фиксируется участок поверхности размером 0,3х0,3 м. Объектив камеры перед запуском аппарата был установлен на минимальное фокусное расстояние. Съемка производилась через нейтральный светофильтр (73). Первые снимки были переданы в телевизионную сеть США и через связной спутник Early Bird в телевизионную сеть Западной Европы (57). После передачи изображений была проведена ориентация панели с солнечными элементами на Солнце (в дальнейшем положение панели относительно Солнца корректировалось один раз в сутки), а остронаправленной антенны — на Землю.
Через 3 час. 15 мин. после посадки аппарат был подготовлен для передачи изображений с разверткой 600 строк с помощью остронаправленной антенны. Скорость передачи этих снимков составляла 4400 двоичных единиц в сек. Мощность принимаемого на Земле сигнала составляла 101,7 дб/вт (25). Со 2 по 8 июня ежедневно, в те периоды (в течение 9—10 час. в сутки), когда аппарат находился в зоне видимости комплекса «Пионер» в Голдстоуне, проводилась передача телевизионных изображений с разверткой 600 строк, в остальное время поступала только телеметрическая информация, принимавшаяся станциями в Крюгерсдорпе и Тидбинбилле (74). В каждом сеансе станция в Голдстоуне в течение 45 мин. принимала изображения, затем оборудование аппарата во избежание перегрева выключалось на 20—30 мин., после чего начиналась передача телеметрической информации, затем цикл возобновлялся. 4 июня для изучения воздействия истекающих газов на грунт 7 раз включена одна из пар управляющих реактивных сопел системы ориентации, расположенная на опоре № 2. Сопла находятся на расстоянии около 20 см от поверхности и направлены вниз под углом 72° от вертикали. Сопла работали импульсами по 20 мсек с интервалами между включениями в 30 мсек, длительность одного из импульсов составила 1 сек. Общее время работы — 4,5 сек. Сопла развивали тягу 0,014 кГ. Съемка этого эксперимента производилась камерой. Снимки, сделанные до и после включения сопел, различий не имеют. Это позволило предположить, что работа сопел не привела к образованию пылевого облака (77). К 5 июня на Землю было передано 2503 изображения. В тот же день поворотное зеркало камеры было ориентировано на Сириус и после ряда попыток были получены его снимки, предназначенные для точного определения места посадки аппарата (77). 8 и 9 июня передача изображений не производилась — был период лунного полудня, и высокая температура поверхности препятствовала нормальной работе оборудования (кроме того, решено предоставить отдых персоналу, обеспечивающему прием и обработку снимков — выяснилась его неподготовленность к обработке большого количества поступающей информации) (75). До 8 июня получено 4000 изображений, часть из них через цветные фильтры, которые реконструировались на Земле в цветные снимки. Позже получены изображения Канопуса и Юпитера (33), получить телевизионные изображения Земли не удалось.
12 июня отказал потенциометр, проработавший около 100 час. (расчетное время—25 час.), входящий в систему определения угла возвышения камеры (75). 14 июня в 15 час. 39 мин. через место посадки прошел лунный терминатор. На телевизионных изображениях, переданных во время и после захода Солнца (съемка производилась в отраженном свете Земли) видны звезды, Солнце, его корона, тень аппарата длиной до 30 м. 14 июня в 16 час. 18 мин. передача изображений прекратилась с наступлением ночи в районе посадки аппарата. С начала съемки до этого момента получено 10 338 телевизионных изображений, с момента посадки на аппарат подано около 10 000 команд. Вероятность возобновления работы аппарата по окончании лунной ночи руководителями полета оценивалась в 25% (52). Перед прекращением связи панель с солнечными элементами была ориентирована так, чтобы прямые солнечные лучи на нее упали примерно 6 июля, т. е. в лунный полдень, через 7 дней, (29 июня) после восхода Солнца над местом посадки. Это было сделано, чтобы основная батарея и электрические цепи успели прогреться примерно до —23° С прежде, чем начнется подзарядка батареи, иначе вследствие нагрева могли возникнуть неисправности в электрической системе. Первоначально во избежание повреждения бортового оборудования было решено не делать попытки войти в связь с аппаратом до наступления лунного полудня, позже было принято решение войти в связь с аппаратом, не дожидаясь, пока он разогреется на Солнце, чтобы получить температурные и другие характеристики сразу же после восхода Солнца. 16 июня в 20 час. 30 мин. получены последние телеметрические данные: температура на поверхности панели с солнечными элементами (—173°С), в контейнере А (+1,7° С), в контейнере В (—17,8° С), основной батареи (+1,1° С). После этого сеанса все оборудование было выключено за исключением 2-х приемников. Оставшейся в основной батарее емкости (около 100 а-ч) было достаточно для питания приемников до 6 июля. 29 июня, после восхода Солнца над местом посадки, была сделана первая попытка войти в связь с аппаратом, но попытка оказалась неудачной. 30 июня эта попытка была повторена, но также оказалась неудачной. 6 июля в 12 час. 29 мин. в период лунного полудня с аппаратом удалось установить связь. В момент установления связи в контейнере А была температура —6,6° С, в контейнере В +15,5° С. Проверка показала, что бортовые системы работали удовлетворительно, однако мощность, обеспечиваемая солнечными элементами, была на 12% ниже номинальной (24). 7 июля от панорамной камеры была получена серия из 38 снимков. 9 июля температура основной батареи достигла 54° С (максимальная допустимая температура основной батареи 60° С), однако перегрев батареи удалось предотвратить. Был проведен эксперимент по включению одного из верньерных двигателей и наблюдению степени воздействия истекающих газов на состояние грунта. После проведения эксперимента следов воздействия не было обнаружено. За второй лунный день с 7 до 13 июля получено 812 телевизионных изображений, в их числе изображения Сириуса и Канопуса. Общее время работы аппарата, в течение которого принимались его сигналы до 13 июля, составило 612 час. 14 июля перед заходом Солнца сделана попытка получить изображение солнечной короны, однако при передаче девятого изображения связь с аппаратом внезапно прекратилась, вероятно из-за резкого падения напряжения основной батареи (после захода Солнца прекратилась ее подзарядка). Всего с начала съемки до этого момента от аппарата было получено 11 150 изображений (54): 23 имеют развертку 200 строк (14 изображений, полученных 2 июля, и неполных 9 изображений солнечной короны, полученных 14 июля), остальные имеют развертку 600 строк (14).
На одном из последних снимков видны разбитые пластинки зеркального стекла, которым облицованы контейнеры. За время полета и функционирования аппарата на Луне с Земли было подано более 100 000 управляющих команд (37). В конце июля все работы, связанные с аппаратом Surveyor I, были прекращены. 8 октября связь с аппаратом Surveyor I, удалось снова восстановить. Аппарат выполнил посланные команды и передал телеметрическую информацию; бортовое оборудование было исправно, за исключением основной батареи, которая не подзаряжалась солнечными элементами. Питание бортового оборудования обеспечивалось вспомогательной батареей. Сигналы, принимавшиеся на Земле, были очень слабыми. С 8 по 12 октября проведено более 5 полных и несколько неполных сеансов связи. Телевизионные изображения получить не удалось из-за высокого уровня шумов. 12 октября в районе посадки аппарата наступила ночь и связь прекратилась. В ноябре 1966 г. на короткий промежуток времени удалось установить связь с аппаратом, а 9 января 1967 г.— еще раз, последний. Связь установили станции в Тидбинбилле и Крюгерсдорпе, однако уровень принимаемого сигнала был очень низким. Сеанс связи продолжался около 12 час. Попытки включить телекамеру не делались. 15—20 февраля 1967 г. участок посадки аппарата Surveyor I был сфотографирован аппаратом Lunar Orbiter III. На снимках удалось обнаружить аппарат Surveyor I в виде белого пятна и отбрасываемую им тень.
Суммарный вес аппарата (10,73) при отделении от II ступени — 995 кГ, после посадки на Луну (вес земной) — 281,2 кГ, в т. ч. каркас аппарата—около 27 кГ (ферма 10,5 кГ), крепление оборудования на каркасе—10,4 кГ. Высота аппарата при сложенном шасси—3,05 м, диаметр окружности, проходящей через опоры развернутого посадочного шасси,— 4,27 м.
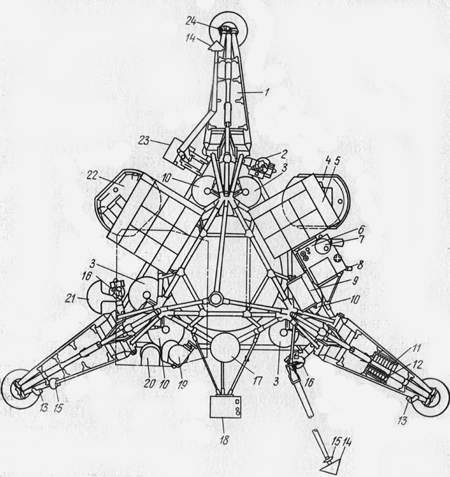
Рис. 15. Схема аппарата Surveyor I (без мачты, на которой монтируются
остронаправленная антенна и панель с солнечными элементами).
1—опора шасси; 2 — шарнирно подвешенный ЖРД; 3 — бак горючего для ЖРД;
4—антенна доплеровского радиолокатора; 5 — контейнер с электронным оборудованием;
6 — датчик системы управления полетом; 7 — датчик направления на Канопус;
8—датчик направления на Солнце; 9—преобразователь; 10—бак окислителя для
ЖРД; 11—усилитель акселерометра; 12—усилитель датчика напряжения; 13—реактивные
сопла ориентации по тангажу и рысканью; 14 — всенаправлеиная антенна;
15 — фотометрическая шкала; 16—жестко закрепленный ЖРД; 17 — баллон со сжатым
азотом для реактивных сопел системы ориентации; 18 — контейнер со вспомогательной
химической батареей; 19 — панорамная телевизионная камера; 20 — «подлетная»
телевизионная камера; 21 — коллектор солнечных лучей; 22—антенна
радиолокационного альтиметра; 23 — источник питания клистрона и модулятор; 24— реактивные
сопла ориентации по крену.
Конструктивная схема аппарата показана на рис. 15. Каркас аппарата изготовлен из алюминиевых (сплав 7075) полых трубок треугольного сечения. К каркасу крепятся 2 всенаправленные антенны, два контейнера (А и В) с электронным оборудованием, тормозной РДТТ, 3 верньерных ЖРД, посадочное шасси и другое оборудование. На верхней части каркаса смонтирована мачта, к которой крепятся остронаправленная антенна и панель с солнечными элементами. В контейнере А размещены 2 приемника, 2 передатчика, основывая батарея и различное оборудование системы электропитания, в контейнере В — декодирующее устройство и другое оборудование командной системы. Оборудование в контейнерах смонтировано на панелях сотовой конструкции. Посадочное шасси имеет 3 ноги, изготовленные из алюминиевого листового сплава 7075 толщиной 1 мм с опорами диаметром 20 см сотовой конструкции из алюминиевого сплава. Посадочные опоры шарнирно соединены с корпусом в трех нижних углах основания. Ноги снабжены гидравлическими амортизаторами самолетного типа, гасящими энергию удара при посадке аппарата, и телескопическими тягами, обеспечивающими развертывание шасси после вывода аппарата на траекторию полета. К углам нижней части корпуса крепятся блоки разрушающейся сотовой конструкции из алюминиевого сплава, обеспечивающие амортизацию удара при посадке (при прогибе ног в момент удара блоки касаются поверхности). Конструкция аппарата рассчитана на посадку при вертикальной составляющей скорости до 6 м/сек и горизонтальной составляющей до 2,2 м/сек на склоны крутизной до 15° п при отклонении продольной оси аппарата от вертикали до 10°.
Электрическое соединение со II ступенью ракеты-носителя осуществляется через 51 штырьковый разъем, установленный в нижней части корпуса между двумя посадочными опорами (разъем состыковывается после установки аппарата на ракету-носитель). До момента отделения аппарата через этот разъем проходят команды от программного механизма, установленного на II ступени, а в аварийных ситуациях могут подаваться команды с наземного пульта управления. Через него проходит также цепь питания от наземных источников питания и цепь предстартового контроля. На аппарате используются 29 пиротехнических устройств, в частности, в замках посадочных опор, в силовых приводах, в системе сброса тормозного двигателя, воспламенителе тормозного двигателя. Некоторые из пиротехнических устройств срабатывают по командам от программного механизма, установленного на II ступени (до разделения аппарата), другие— по командам с Земли. На аппарате установлено 24 датчика для измерения нагрузки на элементы конструкции аппарата в момент посадки.
Тормозной твердотопливный двигатель предназначен для торможения аппарата при посадке на Луну (программа работы двигателя дана в типовой программе полета). На аппарате установлен двигатель марки ТЕ-364-1 (рис. 16), разработанный Reaction Motors Div. Двигатель шаровой формы установлен по оси аппарата в центре тяжести и крепится взрывными болтами к корпусу в 3 точках, расположенных около шарниров посадочных устройств. Вес снаряженного двигателя—624,6 кГ,
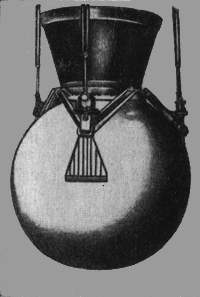 Рис. 16. РДТТ аппаратов
Рис. 16. РДТТ аппаратов
Surveyor.
неснаряженного—65,4 кГ; тяга (при температуре 10-21° С) — 3,6-4,5 т; длина полная—133 см, сопла — 73 см; степень расширения сопла — 50; диаметр корпуса — 94 см, критического сечения—8,3 см, среза сопла 60,9 см; время работы —40 сек. срабатывания воспламенительного устройства—0,15 сек. Корпус двигателя изготовлен из стали марки D-6AC с теплоизоляцией из каучука Buna N с заполнителем из асбеста, а сопло из молибдена за исключением закритической части, изготовленной из слоистого пластика. В критическом сечении имеется графитовый вкладыш. Теплоизоляция и внешнее покрытие двигателя обеспечивают температуру топливного заряда не ниже 10° С. В состав топлива (полибутадиенкрилонитрид) входят перхлорат аммония (окислитель), сополимер полибутадиена и акриловой кислоты (горючее—связка), эпоксидная смола (отверждаю-щий реагент) и присадки алюминия и бериллия (содержание бериллия около 12%).
Верньерные жидкостные двигатели предназначены для проведения коррекции траектории (располагаемая величина скорости при коррекции—50 м/сек), ориентации аппарата во время работы тормозного РДТТ и после окончания работы РДТТ на участке спуска (программа работы двигателей дана в типовой программе полета). Двигатели разработаны Reaction Motors Div. На аппарате установлено 3 верньерных ЖРД «Старлайт» (TD—339) (рис. 17) —один в шарнирном подвесе, остальные—жестко. Двигатели расположены вокруг тормозного РДТТ через 120° и крепятся к каркасу аппарата. Характеристики двигателя (одиночного): тяга—47,2 кГ; диапазон регулирования—13,6-47,2 кГ (тяга каждого двигателя может регулироваться дифференцированно), удельная тяга—287 сек.; давление в камере сгорания—4,9-17,5 кГ/см2 температура в камере сгорания—2900° С; степень расширения сопла (с насадком)—86; вес двигателя (сухой)—2,71 кГ (камера сгорания, сопло, насадок, распылительная головка— 1,35 кГ; клапаны, трубопроводы— 1,36 кГ). Топливом служат самовоспламеняющиеся компоненты— монометилгидразингидрат и четырехокись азота,
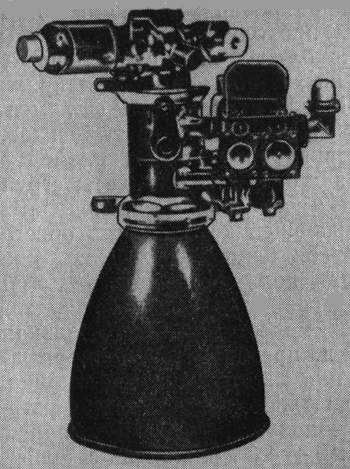
Рис. 17. ЖРД аппаратов Surveyor.
содержащая 10% окиои азота; соотношение компонентов 1,5 : 1. Компоненты топлива в баках находятся в специальных мешках, вес топлива—72,5 кГ. Каждый двигатель имеет свой бак горючего и окислителя, изготовленные из титанового сплава с внутренней теплоизоляцией. Все баки крепятся к каркасу аппарата. Система подачи топлива — вытеснительная; рабочим телом является сжатый гелий, хранящийся в баллоне из титанового сплава и вытесняющий компоненты топлива давлением на гибкую диафрагму. Форсунки подачи горючего — центробежного, окислителя — радиального типа. Клапан, обеспечивающий включение и выключение двигателей многократного действия. Корпуса двигателей изготовлены из нержавеющей стали марки 347. В критическом сечении сопла установлен вкладыш из карбида кремния; неохлаждаемый насадок, установленный на сопле, изготовлен из молибденового сплава с добавлением 0,5% титана. Температура двигателя в интервалах между включениями должна выдерживаться в пределах —17-37° С, для чего большая часть поверхности двигателя имеет золотое покрытие, а части двигателя, обращенные к Солнцу, окрашены специальным составом. Охлаждение двигателей — регенеративное.
Система энергопитания предназначена для обеспечения электроэнергией бортовых систем аппарата во время полета и в период функционирования во время лунного дня. Расчетная минимальная продолжительность работы системы—30 земных суток (приблизительно одни лунные сутки), максимальная—90 земных суток. Рабочее напряжение систем аппарата — 29 в. Панель с солнечными элементами площадью 0,84 м2 несет 3960 солнечных n—р элементов, покрытых тонкими листами зеркального стекла; размер элемента 1,2 Х 1,2 см, толщина—0,45 мм. Элементы сгруппированы в 792 отдельные секции и соединены по последовательно-параллельной схеме, исключающей возможность обесточивания систем при выходе из строя одного элемента. Максимальная мощность в полете при полном освещении Солнцем — 89 вт, на Луне при температуре 60° С — не менее 77 вт, а при температуре 115° С—не менее 57 вт. Удельная мощность— 120,7 вт/кГ, к. п. д. преобразования энергии—8,2%. Панель сотовой конструкции изготовлена из алюминиевого сплава, ориентация ее на Солнце обеспечивается устройством ASPP с точностью до нескольких градусов. Вес панели с солнечными элементами и ASPP—4,8 кГ. Панель с солнечными элементами расположена в верхней части аппарата на специальной штанге. При старте панель сложена и раскрывается после выведения аппарата на траекторию полета. Основная химическая серебряно-цинковая батарея обеспечивает энергопитание систем аппарата до ориентации на Солнце панели с солнечными элементами, а также в те периоды, когда необходима пиковая мощность. Батарея состоит из 14 серебряно-цинковых элементов, подзаряжаемых солнечными элементами. Емкость батареи 3800 а-ч при разрядном токе 1,0 а, обеспечиваемое напряжение—22 в в диапазоне температур от 4 до 60° С. Вспомогательная серебряно-цинковая батарея предназначена для использования в те периоды, когда необходима пиковая мощность, она не подзаряжается от солнечных элементов, размещена в герметичном контейнере, изготовленном из магния, емкость батареи 800—1000 а-ч. Регулятор зарядного тока батареи и регулятор повышения напряжения предназначены для регулирования работы системы энергопитания. Регулятор зарядного тока батареи соединяет панель с солнечными элементами с основной батареей, обеспечивая передачу энергии в количестве, необходимом для полной зарядки батареи, и поддерживая на выходе батареи постоянное напряжение. В регуляторе имеются чувствительные и логические цепи, которые автоматически включают подзарядку батареи, когда напряжение на клеммах батареи падает ниже 27 в. На вход регулятора повышения напряжения подводится постоянный ток напряжением 17—22,5 в от солнечных элементов, основной батареи или от обоих источников одновременно. На выходе регулятора поддерживается напряжение 29 в, которое подводится к трем главным силовым линиям аппарата. Эти три линии питают все оборудование аппарата, кроме нерегулируемой линии напряжением 22 в, которая обеспечивает питание нагревателей, переключателей, силовых приводов, электронных цепей, не требующих для нормальной работы регулировки напряжения или имеющих свой собственный регулятор.
Радио- и телеметрическое оборудование (71) предназначено для связи с наземными станциями слежения, получения и преобразования телеметрической информации о работе бортовых систем и телевизионных изображений к виду, удобному для передачи, и передачи этой информации, а также для дешифровки команд, поступающих на борт. 2 приемника (один запасной) работают в диапазоне S (2200—3950 Мгц) и могут подключаться на любую из 2-х всенаправленных антенн. 2 передатчика (один запасной) могут подключаться на любую из 3 антенн, установленных на аппарате. Несущая частота передатчиков—2295 Мгц, мощность—0,1 или 10 вт. При мощности 0,1 вт передатчики работают до отделения аппарата от ракеты-носителя, а затем переходят на работу при мощности 10 вт. Метод модуляции КИМ—ЧМ или КИМ—ФМ-(передатчик мощностью 0,1 вт), КИМ—ЧМ или ЧМ (передатчик мощностью 10 вт); 2 всенаправленные антенны имеют низкий коэффициент усиления, через них ведется прием команд с Земли и передача на Землю телеметрической информации. При передаче телевизионных изображений с использованием всенаправленной антенны обеспечивается развертка изображений в 200 строк. Всенаправленные антенны—конические, шарнирно крепятся на стержнях длиной 1,4 м, развертываются после вывода аппарата на траекторию полета выталкивателями, работающими от пиропатрона, и выводятся в рабочее положение торсионными пружинами. Многодипольная широкополосная плоская остронаправленная антенна с большим коэффициентом усиления используется для передачи телевизионных изображений, обеспечивая развертку изображений в 600 строк. Ориентация антенны на Землю, как и панелей с солнечными элементами на Солнце, обеспечивается устройством ASPP. Декодирующее устройство командной радиолинии рассчитано на обработку 256 команд в обоих направлениях (команды типа «включено—выключено»), а также команд, управляющих временным интервалом работы системы. Любая команда проверяется в центральном блоке декодирования команд; если структура команд неправильна, то команда не проходит, а сигнал отправляется обратно на Землю. Факт приема команды подтверждается передачей соответствующего сигнала на Землю; после этого команда поступает в блок декодирующего устройства, где переводится из двоичного кода в форму, удобную для выполнения соответствующей команды. Телеметрическая система обеспечивает передачу данных о 200 различных параметрах; скорость передачи — 17,2; 137,5; 500; 1100 (при использовании всенаправленной антенны) и 4400 бит/сек (при использовании остронаправленной антенны). Получение большинства телеметрических данных (температура, напряжение, сила тока, давление и т. п.) обеспечивается блоком обработки телеметрии или вспомогательным блоком обработки сигнала. Ни один из 200 регулируемых телеметрических параметров не передается непрерывно; в блоке обработки телеметрических сигналов имеются 4 переключателя, с помощью которых можно последовательно передавать определенные сигналы. Использование переключателей определяется видом и количеством информации, которую нужно передавать на разных этапах работы сиcтемы. Каждый из переключателей может быть включен в работу в любое время. После блока обработки телеметрических параметров коммутированные сигналы аналого-цифровым преобразователем переводятся с центрального блока обработки сигналов в десятичную систему и затем поступают на вход передатчика. Телевизионные сигналы поступают на вход передатчика в том случае, если передатчик работает на полную мощность. Для получения информации о работе оборудования установлены датчики температуры, тензодатчики для оценки реакции верньерного двигателя на команды системы управления, датчики ударной нагрузки в момент посадки аппарата, акселерометры для измерения вибрации элементов конструкции. Вспомогательный блок обработки телеметрических сигналов снабжен двумя дополнительными телеметрическими коммутаторами. Процесс обработки информации происходит таким же образом, как и в блоке обработки телеметрических сигналов.
Система управления полетом и ориентации аппарата (7,20). Первоначально аппарат Surveyor после выхода на траекторию полета предполагали ориентировать относительно Солнца по командам наземных станций слежения системы DSIF. Расчеты показали, что для захвата аппарата станцией слежения может потребоваться до 60 мин., а за это время у неориентированного относительно Солнца аппарата может нарушиться тепловой режим. Поэтому было принято решение использовать автономную систему ориентации относительно Солнца, вторым опорным светилом выбрана звезда Канопус (а Киля). Преимуществом ориентации по Солнцу и Канопусу является возможность надежного определения положения аппарата при его запуске в полнолуние. Запуск в полнолуние важен для работы телекамеры, так как в этом случае будут получаться изображения хорошо освещенной поверхности. Если аппарат ориентировать по Солнцу и Земле (как аппарат Ranger), то при запуске в полнолуние угол между направлением на Солнце и направлением на Землю будет слишком мал для обеспечения надежной ориентации. Основной солнечный датчик состоит из 5 фотоэлементов на CdS, в системе используется также вспомогательный солнечный датчик. Перед захватом Канопуса производится захват Солнца. Реактивные сопла разворачивают аппарат таким образом, чтобы датчик Канопуса был направлен на звезду, при этом ось крена аппарата остается неподвижной. Блок электронного оборудования включает цифровой программный механизм, коммутационное и переключающее устройства, логический преобразователь и преобразователь вида регистрации данных для радиовысотомера и доплеровского радиолокатора. Поступающая от датчиков информация проходит через логическую цепь в блоке электронного оборудования управления полетом, где по этой информации вырабатываются сигналы, управляющие работой реактивных сопел, тормозного и верньерных двигателей. От датчиков Солнца в блок поступает информация об освещенности их чувствительных элементов, на основании этой информации в блоке вырабатываются сигналы на включение соответствующих реактивных сопел и такой разворот аппарата, чтобы датчики были направлены на Солнце. Инерциальный блок используется для управления полетом, если для выполнения коррекции и осуществления посадки не могут быть использованы оптические датчики; переключение на инерциальный блок—автоматическое, блок использует три гироскопа и акселерометр. Сигналы с гироскопов, проходя через блок электронного оборудования управления полетом, включают соответствующие реактивные сопла, изменяющие или поддерживающие требуемое положение аппарата. На этапе посадки аппарата инерциальный блок управляет работой верньерных двигателей, изменением их тяги по каналам курса и тангажа и поворотом двигателя по каналу крена. Величиной суммарной тяги двигателей управляет акселерометр. Разработчик аппаратуры инерциальной системы ориентации—Кеагfott Div. Доплеровский радиолокатор (AMR-Altitude/Marking Radar—радиолокатор, регистрирующий высоту), предназначен для измерения расстояния до Луны на подлетном участке и выдачи сигналов на бортовые устройства; программа работы радиолокатора дана в типовой программе. Разработчик радиолокатора Ryan Aeronautical Co. Радиолокационный альтиметр (радиовысотомер) предназначен для измерения расстояния до Луны после прекращения работы радиолокатора AMR. Доплеровский радиолокатор (доплеровский датчик скорости) начинает работать, как и альтиметр, после включения РДТТ. Радиолокационный альтиметр в сочетании с доплеровским радиолокатором получил обозначение RADVS (Radar Altimeter and Doppler Velosity System — система радиолокационного альтиметра и доплеровского измерителя скорости). Разработчик RADVS — Ryan Aeronautical Co.
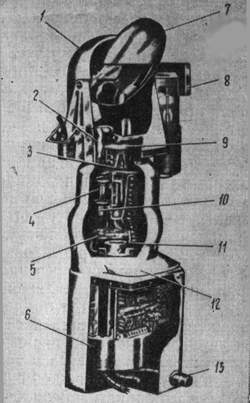
Рис. 18. Панорамная телевизионная камера.
1— кожух; 2 — электродвигатель для поворота зеркала 7 по азимуту; 3 — объектив с изменяемым фокусным расстоянием; 4 — потенциометр; 5—затвор; 6—преобразователь; 7 — зеркало; 8 — устройство для поворота зеркала по углу места; 9—диск со светофильтрами; 10 — потенциометр; 11— видикон; 12 — радиатор видикона; 13 — электрический разъем.
Параболические антенны радиолокационного альтиметра и доплеровского радиолокатора излучают по два луча каждая. Лучи 1, 2 и 3 могут излучаться по вертикали или по направлению скорости полета, луч 4 обеспечивает измерение высоты над поверхностью или наклонной дальности. Лучи 1, 2, 3 используют эффект Доплера, дают информацию о скорости снижения. Данные о высоте и скорости снижения поступают в блок гироскопов и логическую схему, где вырабатывается сигнал управления верньерными двигателями. Управляющие реактивные сопла обеспечивают управление положением аппарата с момента отделения от II ступени ракеты— носителя до включения тормозного двигателя. 3 пары сопел размещены попарно (противоположно направлены) на концах посадочных опор; тяга каждой пары сопел по 14 г. У каждой пары сопел имеется свой селеноидный клапан включения. Одна пара сопел управляет движением аппарата в горизонтальной плоскости, сообщая аппарату вращательное движение, две другие пары—по каналам тангажа и курса. Рабочим телом служит сжатый азот весом 2 кГ, размещенный в сферическом баллоне.
Телевизионное оборудование предназначено для получения телевизионных изображений лунной поверхности в районе посадки. Панорамная телевизионная камера (7, 20) (рис. 18) предназначена для получения изображений после посадки аппарата на поверхность Луны. Вертикальное сканирование камеры обеспечивается подвижным эллиптическим зеркалом, горизонтальное — поворотом головки камеры. Шаг поворота зеркала 3°±0,°1—по-азимуту и 2°,48'±0°,1—по высоте. При наклонах зеркала и поворотах его в поле зрения камеры попадает часть посадочной опоры аппарата и другие элементы конструкции. Расстояние камеры до посадочной опоры составляет 2,4 м. Наводка на резкость от 1,2 м до ∞ осуществляется по командам с Земли. Установка диафрагмы производится по командам с Земли или автоматически в зависимости от уровня освещенности. Фокусное расстояние переменное и может регулироваться, диафрагма может изменяться от 4 до 22. Разработчик объективов с изменяемым фокусным расстоянием — Bell and Howell Co. Шторка затвора расположена в фокальной плоскости. При необходимости по командам с Земли можно обеспечивать любую длительность экспозиции. При слишком большой освещенности (при изменении площади обзора камеры, угла поворота зеркала или величины диафрагмы высоты Солнца) блокирующее устройство по команде через чувствительный элемент препятствует открытию затвора. Этот же чувствительный элемент управляет автоматической установкой диафрагмы; по команде с Земли действие чувствительного элемента может быть заблокировано. В таблице 6 приведены характеристики панорамной телекамеры.
| Характе- ристики | Фокусное расстояние объектива, мм | Разрешающая способность | Угол обзора, град | Сканирование | Глубина резкости объектива,м | Длительность экспозиции, м/сек (в автоматическ. режиме) | ||
| угловая, мрад | линейная, мм | вертикальное, град | горизон- тальное, град | |||||
| Величина | 25 100 | 2 0,5 | 19 6.3 | 6,4 25,4 | (+40)-- (-60) | 360 | от 1,2 до ∞ | 150 |
Камера снабжена нейтральным и 3-цветными (красный, синий, зеленый) светофильтрами, смена которых осуществляется по командам с Земли. Камера может обеспечивать получение удовлетворительных изображений при освещенности 2 лк. Передающей трубкой является видикон с электростатической фокусировкой и магнитным отклонением.
В таблице 7 приведены режимы передачи телевизионных изображений.
Камера имеет три режима работы. При работе в первом режиме (изображения с разверткой 600 строк) камера работает с периодом 3,6 сек. В течение 1 сек. происходит считывание; 0,2 сек. используется для экспозиции (одновременно передается телеметрическая информация о положении зеркала и о температуре окружающей среды); 2,4 сек. используются для подготовки фотокатода видикона и записи следующего кадра. Во втором режиме (изображения с разверткой 200 строк) камера работает с периодом 60,8 сек.
| Передача изображений через антенну | Скорость передачи изображений, дв.ед.в сек | Время | ||||||
| остронаправленную | всенаправленную | |||||||
| раз- вёртка, строк | полоса видео- сигнала, кгц | периодичность получения изображений, сек | раз- вёртка, строк | полоса видео- сигнала, кгц | периодичность получения изображений, сек | передачи одного снимка, сек | между передачей 2 снимков, сек | |
| 600 | 220 | 3,6 | 200 | 1,2 | 60,8 | 4400 | 1,1 | 2,5 |
Третий режим используется при съемках звездного неба и поверхности Луны, освещенных светом, отраженным от Земли. При этом видикон работает в режиме накопления. «Подлетная» телевизионная камера предназначалась для получения изображений лунной поверхности на участке подлета аппарата к Луне. Включение камеры предусматривалось только в том случае, если аппарат вследствие неудачной коррекции пройдет мимо Луны (на аппарате Surveyor I «подлетная» камера не включалась).
Система терморегулирования (7,20) обеспечивает поддержание заданного температурного режима бортовых систем аппарата. Терморегулирование оборудования, установленного в контейнерах А и В и вне их, осуществляется активными и пассивными средствами. В контейнере А температура должна поддерживаться в пределах 4—52° С, система терморегулирования контейнера весит 11,3 кГ. В контейнере В температура должна поддерживаться в пределах —18— +52° С, система терморегулирования контейнера весит 8,2 кГ. Толщина внешней стенки контейнеров, изготовленных из алюминиевых сплавов, равна 0,5 мм. Между внешней и внутренней стенками обоих контейнеров проложена теплоизоляция из 75 листов майлара с алюминиевым покрытием; толщина одного слоя 6 μ, общая толщина около 25 мм. Снаружи контейнеры облицованы пластинками зеркального стекла. При падении температуры ниже указанного предела включаются установленные в контейнерах нагреватели, при повышении температуры полки, на которых смонтировано оборудование, подключаются к радиаторам, отводящим тепло. В обоих контейнерах имеются датчики температуры, показания которых по телеметрическим каналам передаются на Землю, и блоки нагревателей для поддержания температуры в заданных пределах. В контейнерах установлены термовыключатели, которые в случае повышения температуры более 52° С автоматически срабатывают и отводят часть тепловой энергии к радиатору, в контейнере А установлено 9, в контейнере В - 6 термовыключателей. Для обогрева оборудования используется около 3 вт мощности системы электропитания. Терморегулирование оборудования, не заключенного в контейнерах, обеспечивается его окраской или полировкой. Цвет аппарата — белый.
Слежение и связь с аппаратами Surveyor осуществлялась станциями системы DSIF. В сеть станций системы DSIF входили: комплекс «Пионер» в Голдстоуне, включающий 2 станции с антеннами, имеющими отражатели диаметром 64 и 26 м; станция «Марс» в Голдстоуне с диаметром отражателя антенны — 64 м, использовавшаяся как вспомогательная к комплексу «Пионер»; станция в Робледо-де-Чавела (Испания, в 46 км к северо-западу от Мадрида) с диаметром отражателя антенны 26 м; станция в Крюгерсдорпе (ЮАР, в 32 км к западу от г. Иоганнесбург) с диаметром отражателя антенны 26 м; станция в Айленд — Лагун (Австралия, полигон Вумера) с диаметром отражателя антенны 26 м; станция в Тидбинбилла (Австралия, близ г. Канберра) с диаметром отражателя антенны 26 м. Станции системы DSIF имеют передающую частоту 2110—2120 Мгц, приемную—2290—2300 Мгц. Станции образуют пары, разнесенные примерно на 120° по долготе с некоторым перекрытием углом обзора, что дает возможность непрерывной связи с аппаратом, причем он находится одновременно в пределах видимости 2 станций одной пары. Руководство работой станций, управление аппаратами и все необходимые расчеты проводились координационно-вычислительным центром SFOF (Space Flight Operations Facility—Центр по обслуживанию космических полетов) в г. Пасадене (шт. Калифорния), созданным и подчиненным Лаборатории реактивного движения. В задачи SFOF входят контроль работы бортовых систем, определение параметров траектории полета, расчет уставок для маневров и контроль их выполнения, прием научной информации, управление работой научных приборов. В соответствии с назначением SFOF персонал КВЦ был разбит на баллистическую, телеметрическую и группу управления. В отдельные моменты в слежении и управлении аппаратом участвовало до 300 человек. Телеметрические данные от аппаратов поступали на станции по 500 каналам. Центр SFOF имеет, в частности, аппаратуру для реконструкции телевизионных изображений, передаваемых построчно, и аппаратуру для их экспресс-анализа. (75)
назад