 БОРИС НИКОЛАЕВИЧ ПЕТРОВ (р. 1913) — специалист в области автоматического управления, академик, член Президиума Академии наук СССР, академик-секретарь Отделения механики и процессов управления Академии наук СССР, заведующий отделом Института автоматики и телемеханики (технической кибернетики), профессор Московского авиационного института имени С. Орджоникидзе, лауреат Ленинской премии. В 1939 окончил электромеханический факультет Московского энергетического института по специальности электроаппаратостроение. Затем выполнял работы по автоматизации производственных процессов и автоматизации контроля размеров. В 1945 защитил диссертацию по теории автоматических копировальных систем, за которую ему была присуждена ученая степень доктора технических наук. В 1948 ему было присвоено звание профессора. В 1953 Б. Н. Петров был избран членом-корреспондентом Академии наук СССР, в 1960 — академиком. В 1963 он избирается академиком-секретарем Отделения механики и процессов управления и членом Президиума Академии наук СССР. Основные научные труды Б. Н. Петрова относятся к области автоматического регулирования и управления, теории автоматического регулирования сложных объектов, теории инвариантности, теории самонастраивающихся систем и разработке принципов построения некоторых типов автоматических устройств. |
Николаевич
Петров
Принципы управления
космическими
аппаратами
Космическая эра насчитывает всего 10 лет, но научные и технические достижения в освоении космоса за столь короткий срок превосходят все, что было сделано в этой области за всю историю человечества. Конечно, эти достижения опираются на результаты, полученные во многих областях науки, и являются следствием все ускоряющегося технического прогресса.
Пожалуй, невозможно назвать другую сферу деятельности человека, в которой за такой короткий срок было бы преодолено столько исторических рубежей, было бы совершено столько открытий, где героизм первооткрывателей в такой степени сочетался бы с реализацией дерзновенных замыслов ученых.
Создание ракетно-космических систем потребовало решения многих сложнейших научных и технических задач, подобных которым еще не знала практика.
Разработка проблем ракетно-космической техники явилась мощным толчком в развитии многих областей науки. Можно с полным основанием утверждать, что первое десятилетие космической эры — это целая эпоха в развитии естественных и технических наук.
Системы управления ракетно-космическими комплексами и космическими летательными аппаратами представляют собой сложные автоматизированные системы, уникальные по своей точности и многообразию выполняемых ими задач. Для их создания потребовалось существенное развитие теории управления и использование самых последних достижений техники. Достаточно рассмотреть основные задачи управления космическими объектами и оценить трудности, которые приходится преодолевать при их создании, чтобы представить себе величие достигнутого и перспективы будущего.
По своему назначению космические летательные аппараты можно разделить на следующие основные группы.
I. Искусственные спутники Земли и космические корабли:
— простейшие искусственные спутники, к числу которых относится и первый в мире советский искусственный спутник Земли, — это невозвращаемые и нестабилизируемые аппараты. Орбита, на которую выводится такой спутник ракетой-носителем, изменяется с течением времени в основном под действием аэродинамических сил сопротивления атмосферы и гравитационного поля;
— спутники, снабженные той или иной системой ориентации;
— спутники, снабженные системой коррекции орбиты или системой изменения орбиты, способные переходить с одной орбиты на другую по командам бортовых систем или по командам с Земли;
— возвращаемые спутники или спутники с приборным отсеком, возвращаемым на Землю;
— стационарные спутники, имеющие суточный период обращения вокруг Земли;
— пилотируемые космические корабли, снабженные как автоматической, так и ручной системой управления и посадки в заданный район Земли;
— системы спутников или космических кораблей, обеспечивающих автоматическую или ручную стыковку на орбите;
— орбитальные станции.
II. Лунные автоматические станции и космические корабли:
автоматические станции для исследования околоземного и окололунного пространства, обеспечивающие возможность достижения поверхности Луны;
— автоматические станции для облета вокруг Луны;
— автоматические станции, способные совершать мягкую посадку на Луну;
— искусственные спутники Луны;
— пилотируемые лунные ракетно-космические системы, обеспечивающие возвращение космического корабля на Землю.
III. Межпланетные автоматические станции и космические корабли:
— автоматические станции-зонды для изучения межпланетного и околопланетного космического пространства;
— автоматические станции для изучения планет:
а) позволяющие достигнуть планеты,
б) обеспечивающие мягкую посадку на планету,
в) искусственные спутники планет;
— межпланетные космические корабли для облета вокруг планет с возвращением на Землю;
— межпланетные ракетно-космические системы, предназначенные для посадки на планету, взлета с поверхности планеты и возвращения на Землю.
Рассмотрение важнейших типов и назначения искусственных спутников Земли, автоматических станций и космических кораблей позволяет охарактеризовать основные задачи управления космическими летательными аппаратами.
УПРАВЛЕНИЕ ДВИЖЕНИЕМ ЦЕНТРА МАСС
Система управления ракеты-носителя, выводящей космический летательный аппарат на заданную орбиту искусственного спутника Земли, должна обеспечить весьма малые погрешности как по величине, так и по угловым координатам вектора скорости, которую она сообщает летательному аппарату. При полетах к Луне и планетам ошибка вектора скорости, которая получается после выключения реактивного двигателя, сообщающего необходимое количество движения космическому летательному аппарату, должна бы еще меньше. Однако даже предельные возможности современных систем управления не позволяют сразу направить космический аппарат в заданный район лунной поверхности или обеспечить его попадание на одну из ближайших планет. Решение этих задач достигается путем однократной или многократной коррекции траектории полета.
Для осуществления коррекции траектории на борту аппарата устанавливают корректирующую двигательную установку с необходимым запасом топлива и систему коррекции, которая обеспечивает включение и выключение двигательной установки с тем, чтобы сообщить летательному аппарату необходимый импульс. Величину потребного для коррекции траектории импульса обычно вычисляют наземными средствами на основе обработки данных траекторных измерений и передают по радиоканалу на борт космического аппарата.
Для маневрирующих в космосе космических летательных аппаратов (для маневрирующих спутников, например типа «Полет», маневрирующих космических кораблей, космических аппаратов, предназначенных для стыковки на орбите, и др.) корректирующая сближающе-корректирующая двигательная установка используется для перехода с орбиты на орбиту, для коррекции орбиты, для сближения летательных аппаратов и удаления их друг от друга после расстыковки и для выполнения других маневров.
На всех спускаемых с орбиты космических летательных аппаратах устанавливается тормозная двигательная установка, которая обеспечивает переход с орбиты искусственного спутника Земли на траекторию спуска, сообщая аппарату необходимый тормозной импульс, снижающий скорость его полета.
Таким образом, для управления движением центра масс космических летательных аппаратов служат корректирующие и тормозные двигательные установки.
Включение тормозных и корректирующих двигательных установок производится только после того, как космический летательный аппарат будет ориентирован соответствующим образом в пространстве и обеспечена его стабилизация с тем, чтобы вектор тяги двигательной установки был повернут в нужном направлении.
Корректирующие двигательные установки используются также для торможения при запуске искусственных спутников Луны или планеты. Такая двигательная установка позволяет перевести космический летательный аппарат с траектории пролета мимо планеты на орбиту искусственного спутника планеты.
Одной из сложнейших задач управления космическими летательными аппаратами является процесс управления мягкой посадкой на поверхность Луны или планеты. Тормозная двигательная установка, обеспечивающая мягкую посадку, должна снизить относительную скорость летательного аппарата до величины, близкой к нулю, в момент приближения его к поверхности Луны или планеты, лишенной атмосферы. В том случае, когда требуется обеспечить спуск на планету, окруженную атмосферой, мягкую посадку наиболее выгодно осуществлять с помощью парашютной системы, которая вступает в действие после участка баллистического аэродинамического торможения, и лишь на последнем этапе для гашения остаточной скорости целесообразно использовать тормозную двигательную установку.
 | Схема полета в атмосфере и посадки спускаемого аппарата 1 — Начало припланетного сеанса 2 — Отделение спускаемого аппарата (СА) от орбитального отсека 3 — Торможение СА в атмосфере 4 — Раскрытие тормозного парашюта 5 — Раскрытие основного парашюта Начало передачи радиоинформации с борта СА 6 — Начало работы радиовысотомера Научные измерения 7 — Посадка |
Рассматривая типичные задачи управления движением центра масс космических летательных аппаратов, необходимо остановиться еще на одной задаче — использовании так называемой космической двигательной системы малой тяги для разгона или торможения космического аппарата. К числу таких двигательных систем относятся электрореактивные двигатели, «солнечный парус», «изотопный парус» и т. д. Электрореактивные двигатели обладают весьма высокой удельной тягой и обеспечивают малый расход массы на единицу тяги. Если лучшие современные двигатели на химическом топливе имеют удельную тягу порядка 320—350 килограммов на килограмм в секунду расхода топлива, то электрореактивные могут обладать тягой порядка нескольких тысяч единиц. Однако абсолютная величина тяги у таких двигателей не может быть сделана высокой и обычно составляет доли или единицы килограмма. Такой двигатель может применяться для медленного, но экономичного разгона космических аппаратов. Таким способом спутник Земли может перейти на раскручивающуюся спиральную траекторию и в конечном итоге на новую орбиту с высокими апогеем и перигеем или даже достигнуть второй космической скорости.
Используя эффект светового давления солнечных лучей, можно мыслить создание космического аппарата с большой поверхностью, ориентированной перпендикулярно направлению на Солнце. Благодаря световому давлению, на этот аппарат будет действовать постоянная сила, направленная в противоположную сторону от Солнца и составляющая около 4,5·10-6 ньютона на квадратный метр. При длительном действии она может быть использована для изменения полета или разгона космического летательного аппарата. Естественно, что создание такой силы не требует расхода массы.
УПРАВЛЕНИЕ УГЛОВЫМИ ДВИЖЕНИЯМИ ВОКРУГ ЦЕНТРА МАСС
Для многих типов космических летательных аппаратов важной задачей является ориентация, при которой обеспечивается заданное направление в пространстве одной или всех трех осей летательного аппарата. Такая задача возникает, например, когда необходимо обеспечить наилучшие условия работы солнечных батарей. Наивыгоднейшим положением солнечных батарей будет такое, когда их плоскость перпендикулярна направлению солнечных лучей. Другим примером является ориентация параболической антенны космического аппарата на Землю в сеансах радиосвязи. Как известно, параболические антенны имеют острую направленность и требуют точной ориентации их в сеансах радиосвязи.
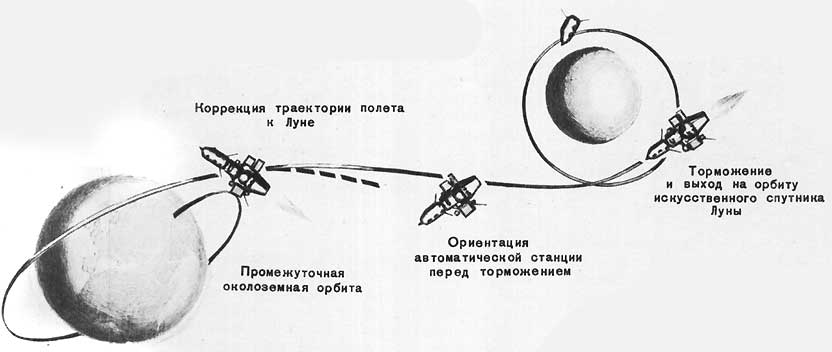 Схема полета автоматической станции «Луна-10» |
Еще более жесткие требования к точности ориентации предъявляются во время проведения коррекции траектории летательного аппарата. Для того чтобы осуществить требуемый корректирующий импульс, необходимо направить продольную ось летательного аппарата под строго определенным углом к его траектории и к плоскости орбиты. Весьма ответственной является задача ориентации космического корабля в период его торможения при переходе с орбиты спутника Земли на траекторию снижения. Для решения многих задач научного исследования космического пространства также необходима ориентация всего космического аппарата или приборов, установленных на нем, в определенном направлении. Так, для спутников, фотографирующих участки земной поверхности, необходима ориентация на Землю, а для космических станций, предназначенных для фотографирования лунной поверхности, необходима ориентация фотоаппаратуры в направлении Луны.
Чаще всего ориентация космического летательного аппарата решается с помощью системы астроориентации. Система астроориентации имеет электронно-оптические датчики, гироскопические измерители скорости вращения аппарата, усилительно-преобразовательную аппаратуру и исполнительные механизмы, создающие вращающий момент. Положение космического летательного аппарата в пространстве обычно фиксируется относительно астрономических ориентиров, например Солнца, какой-либо звезды или Земли. Разворот аппаратов в заданном направлении производится чаще всего с помощью реактивных микродвигателей. При этом система управления включает микродвигатели до тех пор, пока летательный аппарат не займет требуемое положение в пространстве. Затем система ориентации поддерживает оси летательного аппарата в строго заданном направлении.
Система ориентации летательного аппарата обычно имеет три режима работы: первый режим — это процесс поиска астроориентиров, на которые рассчитана система ориентации, второй режим — разворот космического летательного аппарата в заданное положение после того, как астроориентиры попадут в «поле зрения» электронно-оптических датчиков ориентации. Третий режим работы — режим удержания ориентации летательного аппарата относительно заданного направления. Для системы стабилизации возникают наиболее трудные условия в период работы корректирующих или тормозных двигательных установок, когда система стабилизации должна компенсировать возмущения, возникающие при работе двигателей, и обеспечить высокую точность стабилизации.
Практически ориентация летательного аппарата может производиться двумя принципиально различными методами: пассивным и активным.
Пассивной ориентацией принято называть ориентацию летательного аппарата, осуществляемую за счет внешних моментов, создаваемых в результате взаимодействия с окружающей средой. Основными видами пассивной ориентации являются: гравитационная ориентация, аэродинамическая ориентация и др. Известно, что на летательный аппарат, имеющий неодинаковые моменты инерции вокруг его главных осей и движущийся, например, по орбите искусственного спутника Земли, действует гравитационный момент. Если рассмотреть упрощенную модель летательного аппарата, представив ее в виде двух масс, соединенных между собой жестким стержнем, то нетрудно видеть, что на такое тело — «гантель», движущееся в гравитационном поле, будет действовать момент, стремящийся совместить продольную ось «гантели» с направлением местной вертикали.
Можно показать, что величина составляющей гравитационного момента по каждой оси летательного аппарата пропорциональна разности моментов инерции относительно двух других осей. Искусственные спутники Земли с гравитационной ориентацией конструируются таким образом, чтобы сделать разность моментов инерции по различным осям возможно большей. Чаще всего на корпусе спутника прикрепляются достаточно длинные штанги, на концах которых укрепляются массивные элементы. Иногда на концах штанг может быть укреплена полезная масса (аккумуляторы, приборы и т. п.). Трудной задачей при осуществлении пассивной ориентации является демпфирование (успокоение) колебаний, которые неизбежно возникают при выводе на орбиту спутников, имеющих подобную форму. Для этого конструируются специальные узлы крепления штанг, которые рассеивают энергию колебательного движения за счет сил внутреннего трения в материале или с помощью демпфера того или иного типа.
Спутники с гравитационной системой ориентации часто снабжаются системой предварительного успокоения, которая с помощью реактивных микродвигателей обеспечивает быстрое демпфирование колебаний после отделения спутника от ракеты-носителя.
Система предварительного успокоения исключает также возможность «опрокидывания» спутника, т. е. поворота его на 180° по отношению к требуемому положению под влиянием начальной угловой скорости, возникающей в момент разделения, в нерабочее положение, которое тоже является устойчивым. Естественно, гравитационная ориентация не требует затраты энергии.
Несмотря на чрезвычайно малую плотность верхних областей земной атмосферы, искусственные спутники Земли благодаря большой скорости полета испытывают заметное влияние аэродинамических сил, действующих на их поверхность. Если центр давления не совпадает с центром масс спутника, то при этом создается аэродинамический момент относительно центра масс. Такой момент может быть использован для аэродинамической ориентации спутника относительно вектора набегающего потока. Могут быть использованы и специальные стабилизаторы, вынесенные на некоторое расстояние для создания большего момента.
Пассивные методы ориентации наряду с их существенными достоинствами — простотой и минимальными энергетическими затратами — имеют ряд ограничений. Основная особенность, ограничивающая их применение, состоит в том, что каждый из этих методов может использоваться для ориентации летательного аппарата лишь относительно одной вполне определенной системы отсчета и не обеспечивает возможность переориентации. Кроме того, в связи с тем что стабилизирующий момент имеет малую величину, процесс ориентации протекает долго и не всегда обеспечивается достаточно точная ориентация.
К числу методов стабилизации, которые не требуют непрерывного подвода энергии, относится также метод стабилизации космических летательных аппаратов вращением вокруг одной из осей. Хорошо известно, что твердое тело, которому сообщено вращательное движение вокруг одной из его главных осей, сохраняет направление этой оси в пространстве при движении его по той или иной траектории. Это позволяет осуществлять стабилизацию тела относительно этой оси до тех пор, пока какие-либо силы, действующие на него, не нарушат стабилизацию.
Активные методы ориентации не имеют недостатков, присущих пассивным методам, хотя и требуют затраты энергии или массы для создания стабилизирующих моментов. При этом в процессе ориентации происходит потребление энергии или расход массы, запасенной на борту космического летательного аппарата (электроэнергии, сжатого газа, химического топлива), или затраты энергии солнечных батарей. Эти методы позволяют обеспечить ориентацию относительно любой базовой системы отсчета и производить переориентацию, т. е. переход от одной ориентации к другой в тех случаях, когда это необходимо.
Для создания управляющего момента в системах активной ориентации могут применяться реактивные микродвигатели, работающие на сжатом газе или химическом топливе, электрореактивные движители (ионные, плазменные и др.), моментный электропривод, взаимодействующий с магнитным полем Земли, гироскопические устройства или маховики, приводимые в движение электродвигателями.
С помощью маховиков, установленных на борту летательного аппарата, можно управлять движением его вокруг центра масс. Действительно, вращающиеся маховики, не изменяя движения центра масс, создают внутренние моменты, позволяющие изменять угловое положение летательного аппарата относительно базовой системы отсчета. Обычно устанавливают три маховика, оси которых совмещают с главными осями инерции летательного аппарата. При этом возникает необходимость иметь на борту так называемое «разгрузочное устройство» для того, чтобы периодически снимать с маховиков накопленный ими кинетический момент. Это устройство может состоять из системы реактивных микродвигателей или магнитопривода, электромагнит которого взаимодействует с магнитным полем Земли и создает необходимый момент.
Часто используются комбинированные методы ориентации. В таких случаях в дополнение к пассивной системе ориентации устанавливается необходимое количество микродвигателей для коррекции действия пассивной системы, предварительного успокоения и компенсации ошибок, возникающих в результате различных возмущающих воздействий, а также для программных поворотов искусственного спутника или космического корабля.
СИСТЕМА ОРИЕНТАЦИИ ПРИ УПРАВЛЕНИИ СПУСКОМ
Рассмотрим систему ориентации, предназначенную для спутников и космических кораблей, которые должны совершать посадку в заданном районе Земли. Как уже говорилось, для того чтобы перевести спутник с движения по орбите на траекторию спуска, необходимо изменить скорость его полета, сообщив с помощью двигательной установки необходимый тормозной импульс. Направление импульса должно лежать в плоскости орбиты спутника, а угол наклона вектора импульса к местному горизонту, момент включения тормозной двигательной установки и длительность ее работы определяются заранее, в зависимости от положения заданного района посадки на земной поверхности и параметров орбиты спутника. Таким образом, система управления спуском должна обеспечить такой поворот спутника, при котором ось тяги ракетного двигателя примет заданное направление, а система стабилизации должна поддерживать с высокой точностью это направление во время работы тормозной двигательной установки.
Система ориентации обеспечила бы решение этой задачи наиболее полно в том случае, если бы она содержала прибор, позволяющий находить плоскость орбиты, и прибор для построения местной вертикали, с помощью которого можно было направить ось ракетного двигателя под заданным углом к горизонту. Однако та же задача может быть решена и более простым путем, хотя при этом требуется затратить несколько больше топлива для обеспечения торможения. Действительно, можно ограничиться одноосной системой ориентации, совмещающей ось ракетного двигателя с направлением на Солнце. Эта задача решается путем поворота всего спутника или космического корабля таким образом, чтобы ось двигателя заняла направление на Солнце. Подобная система накладывает некоторые ограничения на выбор времени спуска с орбиты и выбор района спуска. Однако простота системы делает ее практически удобной.
Система спуска подобного типа применялась, в частности, на кораблях «Восток». Такая система состоит из фотоэлектрического солнечного датчика, трех гироскопов, реагирующих на проекции угловой скорости корабля на его главные оси, усилительно-преобразовательного логического устройства и реактивных двигателей, работающих на сжатом газе и представляющих собой исполнительные органы системы ориентации. Датчик Солнца посылает сигналы в систему ориентации до тех пор, пока ее ось не займет положение, совпадающее с направлением на Солнце.
Если в поле зрения солнечного датчика отсутствует Солнце, система работает по сигналам датчиков угловых скоростей. При этом по командам датчиков включаются управляющие газовые двигатели, происходит гашение угловых скоростей спутника и обеспечивается медленное вращение спутника по тангажу до тех пор, пока Солнце не попадет в поле зрения солнечного датчика. Для обеспечения экономичности работы системы управляющие двигатели работают при этом в импульсном режиме.
Чувствительный элемент солнечного датчика разделен на отдельные участки — «поля зрения». При засвечивании Солнцем того или иного «поля зрения» в логическое устройство поступает соответствующий сигнал. После того как Солнце попадает в «поле зрения» солнечного датчика, происходит ориентация осей спутника относительно направления на Солнце. Если происходит случайная потеря Солнца в «поле зрения» датчика, снова повторяется режим поиска Солнца. Газовые управляющие двигатели и необходимый запас рабочего тела выбираются исходя из того, чтобы обеспечить режим ориентации при наименее выгодных возможных начальных условиях и компенсировать возмущения при работе тормозной двигательной установки.
СИСТЕМА ОРИЕНТАЦИИ АМС, СФОТОГРАФИРОВАВШЕЙ ОБРАТНУЮ СТОРОНУ ЛУНЫ
Рассмотрим систему ориентации автоматической межпланетной станции, с помощью которой были получены первые фотографии обратной стороны Луны. Эта станция была запущена с помощью советской космической ракеты 4 ноября 1959 года. Достаточно высокая точность выведения этой станции на траекторию полета к Луне не потребовала коррекции траектории. Наиболее простой и надежной схемой фотографирования Луны явилась такая схема, при которой фотоаппаратура наводилась путем поворота всей автоматической межпланетной станции (АМС). Система ориентации состояла из солнечного и лунного оптических датчиков, гироскопических устройств, логических и управляющих электронных устройств и исполнительных двигателей, работающих на сжатом газе. Система ориентации была включена, когда АМС находилась на расстоянии около 65 тыс. км от Луны приблизительно на прямой, соединяющей Солнце и Луну; при этом Земля находилась в стороне от направления Луна-Солнце.
С помощью солнечных датчиков АМС была ориентирована на Солнце таким образом, что оптическая ось фотоаппарата оказалась направленной в сторону Луны. Затем оптическое устройство ориентации на Луну отключило датчики ориентации на Солнце и в дальнейшем обеспечило ориентацию на освещенную поверхность Луны. Сигналы «присутствия Луны», поступающие с оптического устройства, дали разрешение на автоматическое фотографирование. В течение всего времени фотографирования система ориентации обеспечивала наведение АМС на Луну. После окончания фотографирования система ориентации была отключена, а АМС приведена во вращение с определенной угловой скоростью, выбранной с таким расчетом, чтобы обеспечить надлежащий тепловой режим станции и не нарушить функционирование аппаратуры АМС.
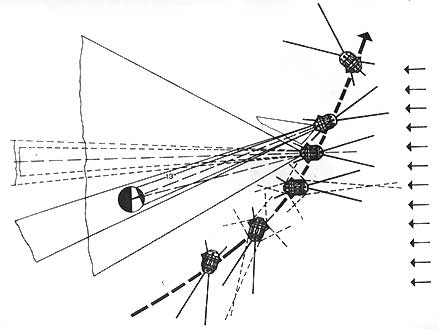 Схема ориентации автоматической межпланетной станции по Луне |
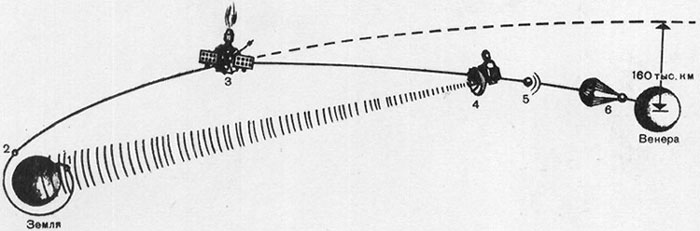 | Схема и основные этапы полета станции «Венера-4»: 1 — Выведение на промежуточную орбиту ИСЗ 2 — Выход на траекторию полета к Венере 3 — Коррекция 4 — Припланетный сеанс Радиосвязь с Землей на параболической антенне 5 — Торможение спускаемого аппарата в атмосфере Венеры 6 — Спуск на парашюте. Проведение научных измерений и передача информации на Землю Посадка |
После автоматического проявления и обработки пленки по командам с Земли была произведена передача изображения Луны с помощью специальной телевизионной аппаратуры, установленной на борту АМС. Сеансы передачи телевизионных изображений полученных фотографий производились после облета станцией Луны в то время, когда АМС находилась в зоне прямой радиовидимости наземных приемных пунктов.
СИСТЕМА ОРИЕНТАЦИИ МЕЖПЛАНЕТНОЙ СТАНЦИИ «ВЕНЕРА-4»
В качестве следующего примера рассмотрим системы ориентации и стабилизации советской межпланетной станции «Венера-4». В этой системе астроориентирами были выбраны Солнце, Земля и звезда Канопус. Во время полета станции к Венере производилась постоянная ориентация панелей солнечных батарей перпендикулярно лучам Солнца. При этом не требовалось высокой точности ориентации. Ориентация в таких случаях может поддерживаться с точностью до нескольких градусов. Специальный оптико-электронный датчик позволяет найти направление на Солнце. В дальнейшем он посылает в систему сигнал об отклонении плоскости батарей от требуемого положения. При этом осуществляется лишь одноосная ориентация межпланетной станции. Такой же режим ориентации может быть получен за счет закрутки межпланетной станции вокруг оси, перпендикулярной плоскости солнечных батарей и предварительно направленной на Солнце. При этом связь станции с Землей поддерживается с помощью малонаправленной антенны.
В сеансах радиосвязи с Землей, во время которых передается телеметрическая информация с борта межпланетной станции, связь поддерживается с помощью остронаправленной параболической антенны. Для этого необходима более точная ориентация на Землю. Ориентация станции на Землю в этом режиме осуществляется с помощью электронно-оптических датчиков Солнца и Земли.
 | Спутник серии «Космос» с аэрогироскопической системой стабилизации |
Наиболее ответственный этап ориентации станции — во время проведения коррекции траектории. При этом космическая станция ориентируется относительно направления на Солнце и на звезду Канопус. Станция разворачивается до тех пор, пока Солнце и звезда не попадут в «поле зрения» соответствующих оптических датчиков и ось корректирующего двигателя займет требуемое положение в пространстве. После этого включается система стабилизации, которая работает во время действия корректирующей двигательной установки.
СИСТЕМА ОРИЕНТАЦИИ СПУТНИКОВ «МЕТЕОР»
Примером спутников, на которых реализованы система трехосной ориентации и независимая ориентация солнечных батарей на Солнце, могут служить метеорологические спутники системы «Метеор» — спутники «Космос-122», «Космос-144», «Космос-156», «Космос-184», «Космос-206».
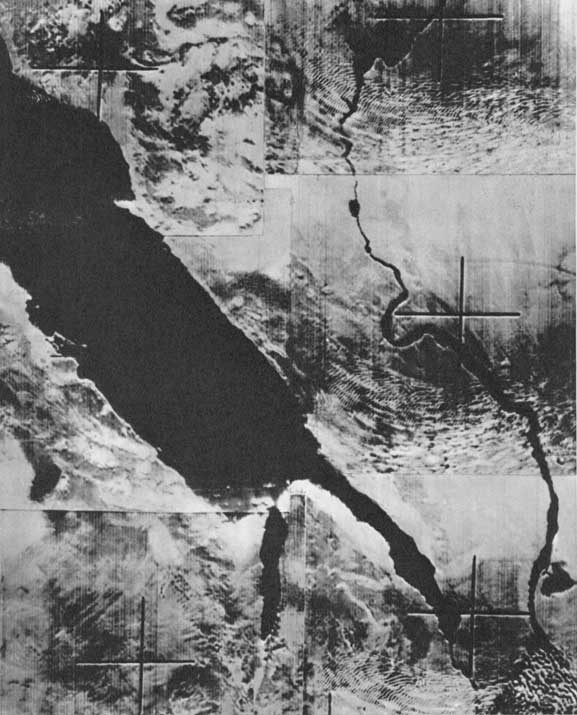 Снимок земной поверхности, полученный с помощью искусственного спутника Земли «Метеор» |
Эти спутники передают комплексную метеорологическую информацию, содержащую телевизионное изображение в видимом участке спектра и инфракрасное изображение как освещенной, так и теневой сторон земной поверхности, а также многодиапазонные актинометрические (радиационные) измерения. Для выполнения этой задачи спутник должен быть строго ориентирован на Землю. Его главная ось должна быть направлена по местной вертикали, вторая — по вектору скорости (по касательной к траектории) и третья — перпендикулярно плоскости орбиты. Такая ориентация обеспечивается с помощью специальной системы маховиков, которые включаются по командам логического устройства, принимающего сигналы от датчиков направления на Землю и по курсу. Система ориентации обеспечивает предварительное успокоение спутника после отделения его от ракеты-носителя, а затем поддерживает заданную ориентацию.
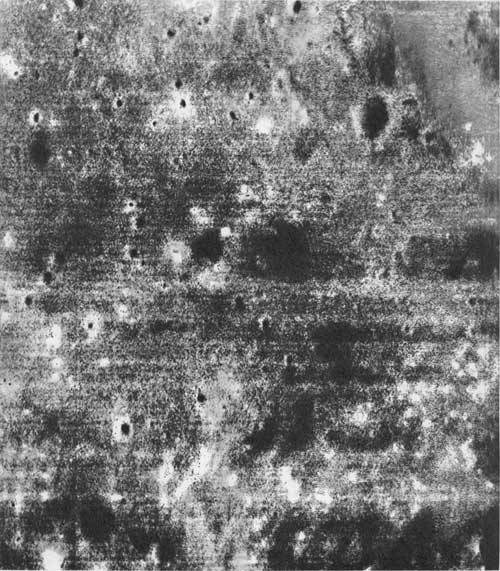 Фотография участка поверхности Луны, сделанная АМС «Луна-12» |
 Схема полета автоматической станции «Луна-9» |
Спутники системы «Метеор» имеют независимую ориентацию солнечных батарей на Солнце. Плоскости батарей могут поворачиваться вокруг осей, перпендикулярных главной оси спутника, с помощью специального электродвигателя, получающего команды от автономной системы слежения за Солнцем. Эта система, содержащая фотодатчики, усилители и логическое устройство, обеспечивает ориентацию плоскостей солнечных батарей перпендикулярно направлению солнечных лучей и позволяет получить максимальную энергию при любом положении орбиты относительно Солнца.
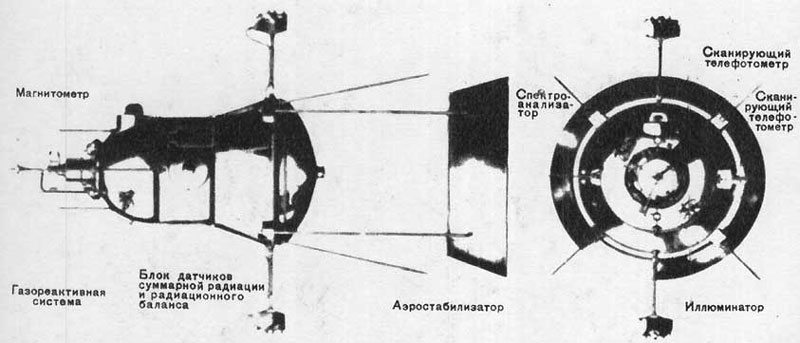
АЭРОГИРОСКОПИЧЕСКАЯ СИСТЕМА ОРИЕНТАЦИИ
В качестве примера спутника с аэрогироскопической системой ориентации можно привести спутник «Космос-149», получивший название «Космическая стрела», на котором такая система была применена впервые.
Этот спутник, предназначенный для исследования состава атмосферы и радиационных характеристик земной поверхности и облачного покрова, имел орбиту с высотой перигея 248 км и высотой апогея 297 км. Сравнительно небольшая высота полета спутника позволила применить на нем аэрогироскопическую систему ориентации, которая обеспечила трехосную ориентацию относительно вектора набегающего потока и направления на центр Земли с точностью около 5°.
Аэродинамический стабилизатор, выполненный в виде конусообразного кольца, выдвигается с помощью специальных механизмов на некоторое расстояние от спутника после отделения его от ракеты-носителя. Связанный с корпусом спутника с помощью длинных штанг аэродинамический стабилизатор играет роль оперения стрелы. Он создает восстанавливающие моменты по тангажу и рысканью*, совмещающие продольную ось спутника с вектором набегающего потока.
Ориентация по крену обеспечивается двумя двухстепенными гироскопами, установленными на борту спутника таким образом, чтобы их суммарный кинетический момент был бы направлен перпендикулярно плоскости орбиты. При появлении крена спутника возникает восстанавливающий гироскопический момент. Гироскопы обеспечивают, кроме того, и демпфирование собственных колебаний спутника. Для сокращения времени затухания колебаний спутника, которые обычно возникают при отделении его от ракеты-носителя, применяется активная система предварительного успокоения, работающая на сжатом газе. Расход газа в этой системе невелик, так как он необходим только для парирования начальных возмущений.
СИСТЕМЫ УПРАВЛЕНИЯ МЯГКОЙ ПОСАДКОЙ
Рассмотрим систему управления мягкой посадкой автоматической станции типа «Луна-9» на поверхность Луны. Система управления мягкой посадкой должна обеспечить безопасный спуск космического аппарата.
*Угол тангажа — угол между продольной осью летательного аппарата и плоскостью горизонта. Угол крена — угол поворота летательного аппарата вокруг его продольной оси.
Угол рысканья — угол между продольной осью летательного аппарата и плоскостью орбиты
При приближении станции к Луне включается аппаратура астроориентации, которая обеспечивает ориентацию станции относительно опорных направлений на Солнце, Луну и Землю. Ориентация осуществлялась на расстоянии примерно 8500 км от точки посадки на Луне.
Задача мягкой посадки автоматической станции на лунной поверхности может быть успешно решена путем ориентации двигателя при торможении вдоль направления относительной скорости. Анализ возможных траекторий сближения станции с Луной показал, что практически для любой траектории, обеспечивающей попадание на лунную поверхность, можно определить такое расстояние от центра Луны, при котором направление на центр Луны будет мало отличаться от направления вектора относительной скорости движения по этой траектории в момент прилунения. Это свойство позволило осуществить достаточно простую систему ориентации станции при торможении. При этом необходимо было иметь оптический датчик лунной вертикали и на заданном расчетном расстоянии обеспечить ориентацию станции по направлению этой вертикали, а также сохранить это направление до начала торможения и при торможении. При полете станции «Луна-9» это расстояние составило 8285 км. Такой способ ориентации обеспечивает минимальную боковую составляющую скорости в момент прилунения. После прохождения станцией заданной высоты датчик лунной вертикали отключался и ориентация станции сохранялась с помощью оптических датчиков, следящих за Землей и Солнцем.
Траекторные измерения позволили с высокой точностью определить скорость движения автоматической станции «Луна-9», составлявшей 2600 м/сек. Эти данные позволили вычислить величину тормозного импульса, который должен быть обеспечен включением двигательной установки мягкой посадки. На высоте 75 км за 48 сек до посадки по команде от радиовысотомера, установленного на борту станции, был включен двигатель. Ось лунного альтиметра должна быть параллельной оси двигателя. Через расчетное время двигатель автоматически выключался. Стабилизация автоматической станции относительно заданного направления в процессе работы двигателя осуществлялась специальными гироскопическими системами. В момент достижения поверхности Луны автоматическая станция была отделена от двигательной установки и прилунилась рядом.
При спуске космического аппарата в атмосферу планеты — Земли или Венеры — для торможения используется атмосфера. Применение двигательной установки для полного гашения скорости аппарата потребовало бы большого расхода топлива. Обычно начальный период торможения производится естественным баллистическим путем. При входе в плотные слои атмосферы происходит резкое торможение летательного аппарата, а затем используется парашютная система для дальнейшего торможения. Конечно, такой способ торможения, при котором происходит резкое нагревание космического аппарата, требует эффективной теплозащиты его поверхности. Однако дополнительный вес теплозащиты оказывается меньшим по величине, чем необходимый запас топлива в том случае, если бы обеспечивалось торможение при спуске за счет двигательной установки. Парашютная система может обеспечить такую величину посадочной скорости, при которой аппаратура автоматической станции может быть сохранена.
Для пилотируемых космических кораблей задача приземления космонавта может решаться двумя способами: либо путем катапультирования космонавта перед приземлением, либо путем посадки в корабле; при этом обычно для увеличения комфорта с помощью дополнительной двигательной установки мягкой посадки, которая включается перед приземлением, скорость космического корабля в момент приземления снижается до нескольких десятков сантиметров в секунду. Такая система была использована на космических кораблях «Восход».
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЫКОВКОЙ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТЕ
Важной проблемой космонавтики является создание крупных космических станций с длительным временем существования их на околоземной орбите. Такие станции имеют большие перспективы при решении различных задач освоения космического пространства. Многие научные исследования космического пространства и внеатмосферной астрономии, проведение продолжительных медико-биологических экспериментов требуют создания космических станций большого веса. Вывод на орбиту таких космических станций в собранном состоянии встречает огромные трудности. Для этого потребовались бы гигантские ракеты-носители
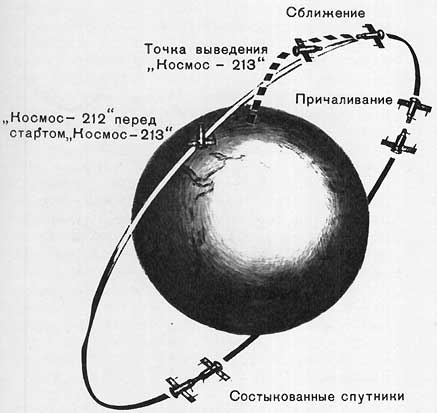 | Схема автоматического сближения и стыковки спутников «Космос-212» и «Космос-213» |
Автоматическая стыковка двух космических аппаратов на орбите — крупный этап решении этой грандиозной задачи. В принципе стыковка может осуществляться полностью автоматически или с участием человека. Решение как той, так и другой задачи представляет собой большой научный и практический интерес. Естественно, труднейшей задачей является осуществление полностью автоматической стыковки. Блестящее решение этой задачи советскими учеными и инженерами было продемонстрировано при автоматической стыковке космических аппаратов «Космос-186» и «Космос-188», которая впервые в истории космонавтики была автоматически осуществлена 30 октября 1967 года. 15 апреля 1968 года состоялась вторая автоматическая стыковка на орбите спутников «Космос-212» и «Космос-213». Трудность решения такой задачи становится очевидной, если учесть, что необходимо сблизить, обеспечить причаливание с относительной скоростью в несколько десятков сантиметров в секунду и соединить два аппарата, движущихся по орбитам со скоростью около 8 км/сек. К моменту стыковки требуется эти аппараты вывести на орбиты, достаточно близкие друг к другу по своим параметрам и лежащие в одной плоскости.
Рассмотрим основные принципы автоматической- стыковки и задачи управления процессом стыковки.
Наиболее рациональное решение задачи автоматической стыковки получается, когда один космический аппарат является «активным», а другой — «пассивным». Активный аппарат осуществляет поиск пассивного аппарата в пространстве, обнаружение, подход к нему, сближение и причаливание. Пассивный аппарат при этом выполняет более простые функции: он должен ориентироваться определенным образом в пространстве и служить маяком для активного аппарата. Активный космический аппарат содержит радиосистему наведения, которая позволяет производить поиск в пространстве пассивного космического аппарата, измерение параметров относительного движения спутников и передает соответствующие сигналы на систему ориентации и автоматического управления движением аппарата.
После окончания процесса поиска осуществляется разворот относительно линии визирования с помощью двигательных установок системы ориентации. А система управления движением включает двигательную установку активного спутника, обеспечивая управление процессом сближения по заданному закону. Закон управления сближением выбирается таким образом, чтобы обеспечить минимальный расход топлива. После того как спутники сблизятся на расстояние порядка 300 м, дальнейший процесс сближения осуществляется с помощью системы двигателей малой тяги, которая позволяет обеспечить тонкое регулирование сближения, и к моменту причаливания получить относительную скорость порядка 10—15 см/сек. При такой скорости обеспечивается безопасность стыковки.
Стыковочный узел активного спутника представляет собой специальную штангу, а стыковочный узел пассивного спутника — приемный конус и устройство захвата и фиксации штанги.
Интересны параметры орбит и некоторые данные, характеризующие эксперимент, осуществленный 30 октября 1967 года. Перед стыковкой «Космос-186» (активный аппарат) имел следующие параметры орбиты: период обращения — 88,64 мин; минимальное удаление от Земли (в перигее) —180 км; максимальное удаление от Земли (в апогее) — 260 км; наклонение — 51,68°. «Космос-188» (пассивный аппарат) имел при выходе следующие параметры: период обращения — 88,97 мин; минимальное удаление от Земли (в перигее) — 200 км; максимальное удаление от Земли (в апогее) — 276 км; наклонение — 51,68°.
После вывода спутника «Космос-188» на орбиту расстояние между спутниками составляло около 24 км, а их относительная скорость была порядка 25 м/сек. При этих начальных данных был осуществлен полностью автоматический процесс поиска, сближения, причаливания и стыковки спутников, а затем их совместный полет как единого жесткого тела в течение 3,5 ч. Все операции во время этого процесса регистрировались телеметрической системой, а на участке вне зоны радиовидимости — записывались на запоминающем устройстве.
После команды с Земли спутники были расстыкованы и перешли на самостоятельные орбиты, а в дальнейшем каждый из них совершил посадку в заданном районе Советского Союза. Как известно, процесс расстыковки и плавного удаления спутников друг от друга можно было наблюдать с помощью системы космического телевидения. Успешное завершение этого грандиозного эксперимента открывает широкие перспективы создания орбитальных научных станций для исследования космического пространства и сложных космических систем для межпланетных полетов. Этот эксперимент подтвердил правильность принципов построения и технических решений создания автоматических систем управления стыковкой спутников на орбите.
УПРАВЛЕНИЕ ЛУННЫМ КОСМИЧЕСКИМ КОРАБЛЕМ
Много сложнейших задач автоматического управления космическими объектами возникает при управлении пилотируемыми ракетно-космическими комплексами, предназначенными для осуществления полета человека на Луну и возвращения на Землю. В качестве примера можно рассмотреть систему управления американским космическим кораблем «Аполлон», рассчитанным на экипаж, состоящий из трех человек.
В целом такой космический корабль состоит из трех отсеков, выводимых на траекторию полета к Луне с помощью мощной ракеты-носителя.
Командный отсек спроектирован для входа в атмосферу, и в нем большую часть полета находятся все три члена экипажа. Во вспомогательном отсеке расположены двигательные системы, обеспечивающие возможность выполнения маневров, источники питания и др. Для посадки на Луну предполагается использовать специальный отсек, в котором в это время будут находиться два члена экипажа, а третий астронавт будет при этом совершать полет по селеноцентрической орбите.
Система управления и навигации такого космического корабля является бортовой системой, применяемой для определения положения и скорости аппарата, а также для управления маневрами. Части этой системы расположены как в командном отсеке, так и в отсеке, предназначенном для совершения посадки на Луну. Каждая часть содержит устройства для запоминания ориентации в инерциальном пространстве и измерения перегрузок, устройства для проведения оптических измерений, приборные щиты и пульты управления, устройства для выведения данных на индикаторы и бортовую цифровую вычислительную машину.

|
Траектория полета лунного корабля состоит из активных участков и участков полета по инерции. Задачи системы управления на этих участках в некоторой степени различаются.
Во время полета по инерции необходимо знать положение аппарата и его скорость, т. е. решать навигационные задачи. При этом используется информация, получаемая с наземных станций слежения за полетом космического аппарата, данные по определению положения аппарата относительно звезд, Земли и Луны, полученные с помощью бортовых оптических устройств, и данные радиолокационных измерений. После сбора указанной информации становится возможным определение положения аппарата, его скорости и маневра, необходимого для попадания в заданную точку. На участках свободного полета, и особенно в периоды сбора навигационной информации, часто возникает необходимость в обеспечении ориентации аппарата. При выполнении маневров используется платформа, стабилизированная в пространстве с помощью гироскопов.
На платформе устанавливаются акселерометры, измеряющие ускорения и снабжающие информацией бортовую вычислительную машину. При управлении аппаратом перед посадкой на Луну необходимо знать его начальную скорость и положение. Информация об этих величинах формируется на участках полета по инерции.
Кратко рассмотрим задачи, которые должна решать система управления и навигации на различных этапах программы.
Выведение на геоцентрическую орбиту. При запуске ракеты-носителя управление осуществляется системой, установленной в передней части ракеты-носителя. На участке выведения, однако, система командного отсека вырабатывает команды, которые могут быть использованы в случае отказа системы управления ракеты-носителя. Кроме того, система управления командного отсека выдает экипажу информацию о точности выведения аппарата на заданную геоцентрическую орбиту.
Участок полета по геоцентрической орбите. Космический аппарат и последняя ступень ракеты-носителя совершают один или несколько витков по геоцентрической орбите. На этом этапе навигационные измерения, проводимые с помощью бортового оборудования, выполняются в основном с целью проверки правильности его функционирования. Оптические элементы системы управления командного отсека используются для уточнения положения и скорости аппарата. Данные, полученные с помощью бортовых устройств, используются совместно с данными, передаваемыми с наземных станций слежения.
Участок свободного полета к Луне. Аппарат отделяется от последней ступени ракеты-носителя вскоре после схода с геоцентрической орбиты. Начальные положения и скорость аппарата точно определяются как с помощью бортовых систем, так и наземных станций. Когда траектория аппарата точно определена, может производиться коррекция траектории. Обычно предусматривается возможность выполнения трех корректирующих маневров, причем каждый из них может привести к изменению скорости аппарата на величину до 3 м/сек. Первая коррекция траектории может быть выполнена примерно через час после старта с геоцентрической орбиты.
Участок выведения лунного отсека на траекторию полета к поверхности Луны. Первая задача системы управления лунного отсека состоит в обеспечении точного выполнения маневра, при котором лунный отсек за счет изменения его скорости на несколько сот метров в секунду выводится на траекторию, заканчивающуюся на высоте 16 км в окрестностях заданной точки посадки. Начальные условия для выполнения этого маневра определяются с помощью навигационного оборудования командного отсека. Данные вводятся в систему управления лунного отсека вручную.
Участок посадки на поверхность Луны. В соответствующий момент времени, установленный системой управления лунного отсека, запускаются посадочные двигатели, уменьшающие скорость спуска лунного отсека. На начальном этапе наведения отсека с помощью инерциальной системы измеряются ускорения и обеспечивается необходимая ориентация аппарата. При дальнейшем управлении посадкой, после того как высота и скорость отсека упадут до заданных пределов, будет использоваться радиолокатор. В то же время члены экипажа обеспечивают ориентацию отсека с помощью специальных отметок, нанесенных на иллюминатор, и информации, поступающей с вычислительной машины. Система управления должна обеспечить наиболее эффективное использование топлива при осуществлении мягкой посадки в заданном месте.
Этап пребывания на поверхности Луны. Когда лунный отсек находится на поверхности Луны, специальный радиолокатор, который используется также и для обеспечения встречи отсеков на орбите, осуществляет слежение за командным отсеком для точного определения положения орбиты командного отсека относительно точки посадки.
Этап старта с поверхности Луны. Для соответствующих начальных условий вычислительная машина отсека определяет траекторию, обеспечивающую встречу с командным отсеком, совершающим полет по орбите спутника Луны, и выдается команда на взлет. С помощью инерциальной системы происходит наведение лунного отсека и определяется момент выключения двигателя. После выключения двигателя лунный отсек совершает свободный полет по траектории, близкой к траектории командного отсека.
Этап полета по промежуточной траектории. Радиолокатор, установленный на лунном отсеке, позволяет получить информацию об относительном положении обоих отсеков. После уточнения взаимного расположения траекторий можно производить их коррекцию аналогично тому, как это делалось на участке полета к Луне.
Этап встречи на селеноцентрической орбите. Когда отсеки сблизятся, по сигналам инерциальной и радиолокационной систем производится управление тягой двигателей, чтобы уменьшить относительную скорость между отсеками. Управление стыковкой отсеков может производиться вручную или автоматически.
Возвращение к Земле. Возвращение командного и вспомогательного отсека к Земле выполняется аналогично этапу полета к Луне с проведением корректирующих маневров. В конце этого участка навигационная система должна точно определить начальные условия для входа в атмосферу и обеспечить вход в относительно узкий «коридор», ограниченный сверху и снизу.
Вход в атмосферу. На участке входа в атмосферу по данным о перегрузках и ориентации аппарата, получаемым с инерциальной системы, производится управление движением отсека с помощью изменения его угла крена. Командный отсек является осесимметричным телом, но его центр массы не лежит на оси симметрии и при полете на балансировочном угле атаки аэродинамическое качество* аппарата составляет около 0,3. Это позволяет, изменяя угол крена, менять угол атаки и таким образом осуществлять управление полетом в продольной плоскости. При входе в атмосферу Земли происходит аэродинамическое торможение командного отсека. При этом его скорость снижается со второй космической до скорости, несколько меньшей, чем первая космическая (круговая). После первого погружения в атмосферу аппарат переходит на баллистическую траекторию, выходя за пределы атмосферы, а затем снова входит в плотные слои атмосферы и переходит на траекторию спуска. Этап управления космическим кораблем при первом погружении в атмосферу является чрезвычайно ответственным, так как, с одной стороны, система управления должна обеспечить поддержание перегрузок и аэродинамического нагрева в заданных пределах, а с другой — обеспечить требуемую величину подъемной силы, при которой будет достигнута необходимая дальность и приземление корабля в заданном районе.
* Аэродинамическим качеством называется отношение величины подъемной силы к силе лобового сопротивления.
Управление космическим кораблем на участке второго погружения может осуществляться по аналогии с управлением при снижении кораблей-спутников.
Наука и техника управления космическими летательными аппаратами находится еще в начальном периоде своего развития. За десятилетие, прошедшее со времени запуска первого искусственного спутника Земли, она сделала огромные успехи и разрешила многие труднейшие проблемы, однако перспективы ее развития еще более грандиозны.
Совершенствование средств вычислительной техники, микроминиатюризация элементов электронных устройств, развитие средств обработки и передачи информации, построение измерительно-информационных устройств на новых физических принципах, разработка новых принципов и устройств ориентации, стабилизации и управления открывают необозримые горизонты создания совершенных пилотируемых и беспилотных космических летательных аппаратов, которые помогут человеку познать тайны Вселенной и послужат решению многих практических задач.